In this section, we aim to tune our depth camera to address its light sensitivity problems. Natural sunlight raises a problem for our car since it cannot properly filter the mask during the daylight setting. We use one of ROS plugins in conjunction with Intel Realsense Depth D455 Camera node to experiment with different camera configurations. Our tuning work involves both finding the best tuned configuration that sets off light intensity and validating the realtime performance of the car running one lap around the track.

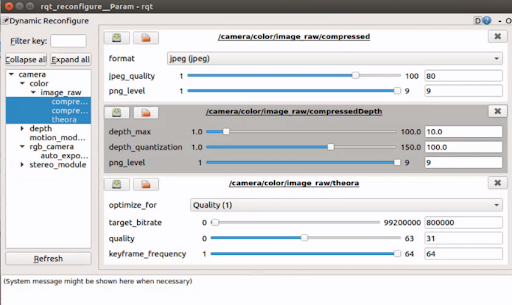
We run our car manually on the track by setting up a launch file that supports the ROS package that loads .yaml files that store parameter levels, allowing us to view and edit parameters manually with GUI or command-line tools. We generate a collection of .bag files with the rosbag command, which takes in the image topic that we have selected. We make sure to repeat this process both during the day and night in order to capture sets of images with non-bright and bright conditions, as well as tuned images under bright conditions
We export a single lap of images recorded with ROS and compare that with other sets of a single lap’s images. The images are read in with the Python OpenCV package. A single image which closely matches that of another set in position and appearance of the track environment are compared together to determine how similar they are in terms of pixels, luminance, contrast and structure. The entire lap set of approximately 60~70 images are compared with sets before and after tuning, to observe the variability of luminescence in realtime.

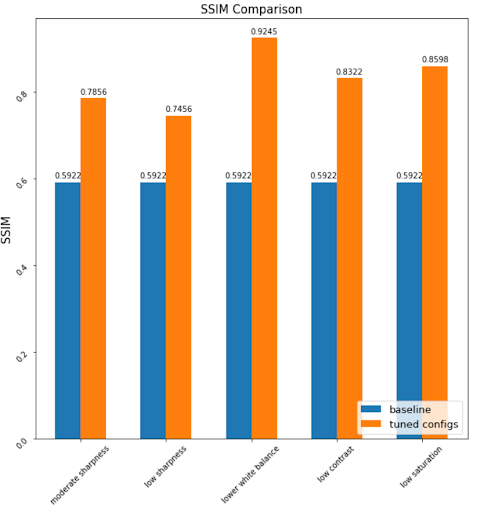
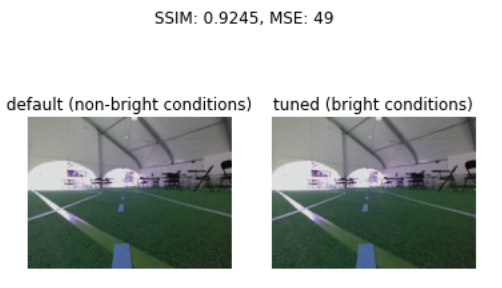
We used evaluation metrics SSIM (Structural Similarity Index) and MSE (Mean Squared Error) to measure the similarity between tuned and default images. Some parameter levels were very useful in closely aligning tuned images to features and noise of the default image, whereas others led to worse results. On the left, you can see the top significant improvements in SSIM.
The image on the right shows our best tuned result, which was significantly better compared to our poor baseline figures of SSIM = 0.5922, MSE = 19243. Using this best tuned configuration in our self-implementation of realtime performance, the returned values were 8.065 for our default image set and 6.907 for the tuned image set, giving us the similarity level of 86%