


Click on the image to learn more

Click on the image to learn more

Click on the image to learn more


Click on the image to learn more
A ROS based stack integrating RTABMAP, Detectron2 and the F1Tenth platform with some tuning done on the Intel Realsense D455. Featured on Nvidia Jetson Community Projects as Project of the Month March 2022. Read more here
Click on the image to learn more
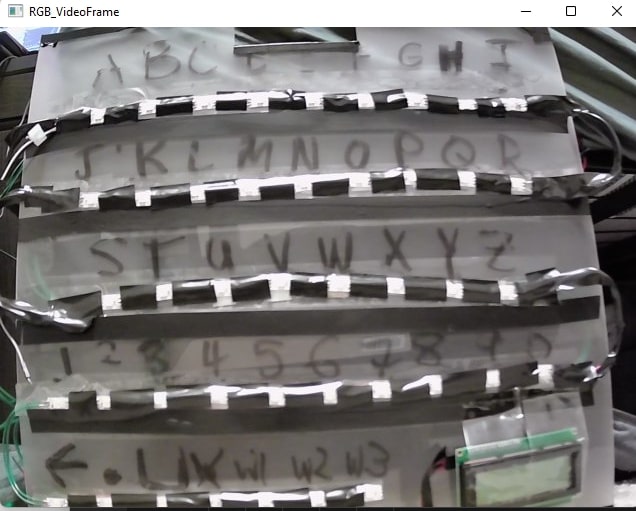
Enabling verbal communication with just the use of head movements. Read more here
Click on the image to learn more
Won 3rd place in IROS 2020 F1Tenth Race as a one man team. Solution integrating 2D Lidar to achieve robust navigation through a race track